
联系我们
- 地 址:大连市甘井子区姚北路26-18号
- 电 话:0411-39528856
-
联系人:132145745368
- Q Q:2605548552
- 网 址:www.klnwj.com
- 传 真:0411-39528856
- E-mail: info@klnwj.com


哈工大机电工程学院谢晖教授团队研制磁控3D打印新技能完成磁性薄壁软体机器人精准制作
更新时间:2025-01-05 作者:米乐客户端
软体机器人凭仗其柔性、适应性和生物相容性,在生物医疗范畴展示出宽广使用远景。经过外部磁场操控材猜中磁性颗粒的摆放方向,可完成对磁性软体机器人变形行为的精准调控。但是,杂乱三维薄壁结构的制作仍是一大技能瓶颈。现有的磁场辅佐直写打印和数字光处理技能易受重力和磁力搅扰导致结构变形,难以打破平面或简略笔直壁结构的约束。这一应战在制作具有大变形才能的三维薄壁结构时尤为杰出。
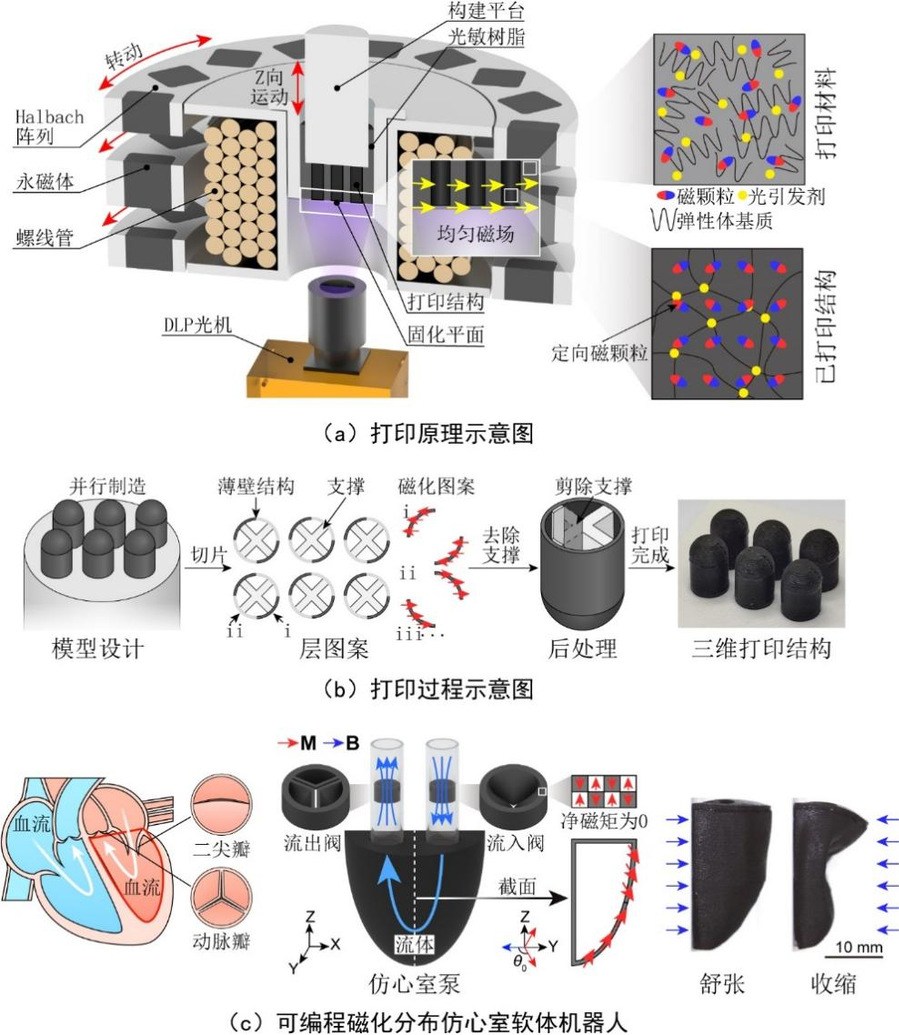
针对以上问题,团队立异性地将海尔贝克阵列与电磁线圈相结合,规划出一款低功耗磁场发生器,可在光固化平面内发生高强度、三维均匀可控的磁场。该体系在直径40毫米的作业空间内完成了80毫特斯拉的磁场强度,均匀度差错操控在5%以内,视点差错小于1.5°,打印面积较同类技能提高一个数量级。经过磁场发生器精准操控光固化结构中硬磁颗粒的磁矩方向,完成了杂乱磁性薄壁结构的制作。团队还经过优化含硬磁颗粒的光固化树脂配方并改善支撑增加战略,显着提高了工艺稳定性。该技能可制作最小壁厚200微米、空心率达0.92的精细结构,并支撑多单元并行制作。
根据该技能,研讨团队成功开宣布多种功用型软体机器人原型,包含具有仿生特性的磁控单向阀、活动功用输运机器人、仿心室软体机器人和胶囊软体机器人,展示了在模仿杂乱生物行为和功用方面的使用潜力。该技能不只打破了磁性软体机器人杂乱中空薄壁结构的制作瓶颈,也为其在仿生和药物投递等范畴的使用拓荒了新途径。
机器人技能与体系全国重点实验室为论文仅有单位。谢晖教授为论文通讯作者。机电工程学院青年教师孟吉祥、博士研讨生李诗诗为论文一起榜首作者。机电工程学院博士研讨生沈行健、田陈堯、毛立阳为论文一起作者。生命科学和医学学部胡颖教授、王星文副研讨员为相关研讨作业供给大力支撑。
哈尔滨工业大学全媒体中心编审 技能上的支撑:哈尔滨工业大学网络安全和信息化办公室